- အီးမေးလ်-doris@chinatopsew.com


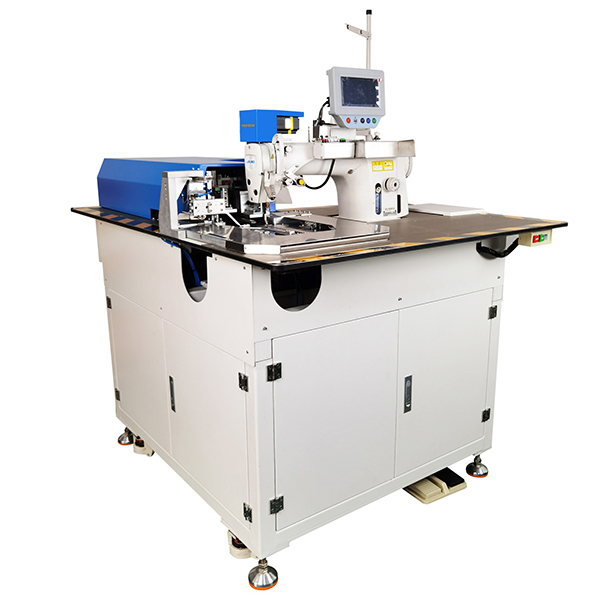


အလိုအလျောက် ရှပ်အင်္ကျီလက် ဖြတ်တောက်စက် TS-850







၁။ လူတစ်ဦးသည် နှစ်ခုကို လည်ပတ်နိုင်သည်အင်္ကျီလက်ပြတ်ခြင်းစက်များကို တစ်ပြိုင်နက် ထုတ်လုပ်နိုင်သည်။ အမြန်နှုန်းမှာ တစ်မိနစ်လျှင် ၄-၅ ခုဖြစ်သည်။
၂။ တစ်ခုရှပ်အင်္ကျီလက်ပြတ်စက်ဘယ်နှင့်ညာ အင်္ကျီလက်များ ပြောင်းလဲခြင်းနှင့် ချုပ်လုပ်ခြင်းကို လုပ်ဆောင်နိုင်သောကြောင့် အခြားပုံစံခွက်ကို ပြောင်းလဲရန် မလိုအပ်ပါ။
၃။ အင်္ကျီလက်ကွာဟချက်မှိုဖွဲ့စည်းပုံသည် အမြန်ပြောင်းလဲမှုကို သဘောပေါက်နိုင်သည်။
၄။ အောက်ပိုင်းထောက်ပံ့မှုသံလိုက်ကိရိယာသည် လက်အိတ်ခေါက်ခြင်း၏တည်ငြိမ်မှုကို တိုးတက်စေနိုင်သည်။
၅။ အီလက်ထရွန်းနစ် နောက်ဆက်တွဲ အရန် ဖိစက် ကိရိယာသည် အပ်ချုပ်ခြင်း၏ တည်ငြိမ်မှုကို သေချာစေသည်။
၆။ သက်ဆိုင်ရာ အထည်အလိပ် အမျိုးအစား အမျိုးမျိုး (ပုံမှန်ရှပ်အင်္ကျီအထည်၊ သံမခတ်ရှပ်အင်္ကျီအထည်၊ ချည်ထည်စသည်)။
၇။ စက်ခေါင်းသည် X-ဝင်ရိုး ဦးတည်ချက်အတိုင်း ရွေ့လျားပြီး အစွပ်မှိုသည် Y-ဝင်ရိုး ဦးတည်ချက်အတိုင်း ရွေ့လျားသောကြောင့် အပ်ချုပ်တိကျမှုကို ဖြည့်ဆည်းပေးနိုင်သည်။


| လက်အရှည် အရွယ်အစား: | ၅၀-၂၀၀ မီလီမီတာ၊ အကျယ် ၁၈-၅၀ မီလီမီတာ။ |
| အလုပ်အမြန်နှုန်း: | ၃၀၀၀rpm (အများဆုံး) |
| ထိန်းချုပ်စနစ်: | ချစ်ပ်တစ်ခုတည်း |
| ချုပ်ရိုးအရှည်: | ၀.၅-၂.၀ မီလီမီတာ |
| ပါဝါ: | ၂ ကီလိုဝပ် |
| လျှပ်စစ်ဓာတ်အားထုတ်ပေးသောကိရိယာ: | ၂၂ov တစ်ဆင့် ၅၀/၆၀Hz |
| လေဖိအား: | ၀.၅ အမ်ပါ (၅ ကီလိုဂရမ်/စင်တီမီတာ) |
| စက်အလေးချိန်: | ၃၉၅ ကီလိုဂရမ် |
| စက်တိုင်းတာခြင်း- | ၁၄၀၀ မီလီမီတာ X ၁၀၇၀ မီလီမီတာ X ၁၂၇၀ မီလီမီတာ |





